基于人机交互的工业机器人高效铣削装备系统
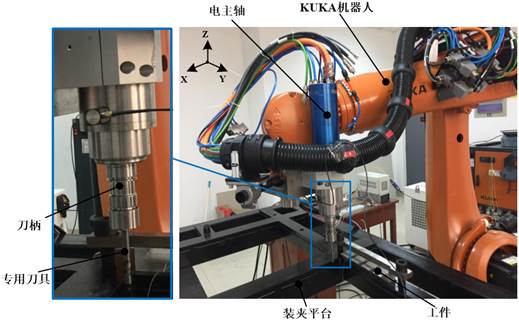
图 基于人机交互的工业机器人高效铣削装备系统
为满足框类结构件装夹用工艺凸台高效、自动去除工艺要求,提升领域整体制造能力与智能化水平,充分发挥工业机器人灵活性高、运动空间大等优势,开展了基于人机交互工业机器人的高效铣削、打磨装备系统研发与关键技术研究。该系统在实现凸台高效、高质量去除的同时为大型零部件的铣削加工提供了新思路。
组成部分:KUKA工业机器人(KR210 R2700 extra)、电主轴、装夹平台等。
控制系统:为满足系统高精度、快响应要求,实现加工系统切削力与位移的动态感知、实时分析与精准执行,本单元采用基于EtherCAT现场总线的控制系统;上位机采用工控机及TwinCAT平台构成的实时控制系统,进行加工过程力/位移复合控制,提升了系统运行的稳定性与可靠性。
创新点:1)开发了基于人机交互的力控编程技术,拖动末端六维力传感器,完成TCP关键点位拾记,生成运动路径,显著提升了编程效率;2)提出了基于力反馈控制的浮动打磨技术,实现了打磨法向力的恒定控制,提升了打磨质量与稳定性;3)研制了去凸台专用刀具,刀具底端为圆柱,铣削过程中可保护工件侧壁不受损伤。
